Directed Greybox Fuzzing
https://acmccs.github.io/papers/p2329-bohmeAemb.pdf
0x00 用一句话描述其内涵
directed fuzzer把大多数时间花在其关注的特定程序点上.
0x01 它能做什么呢?
- patch testing 把关注点放到patch changelog上,更具体些即关注那些因为某处patch而改变过的代码,反过来去测试未打patch之前的应用。
- crash reproduction 例如把关注点放到crash info的call stack上: 当一个crash report出现的时候,提供的有用信息可能只有相应的环境上下文,并没有特定的输入,这种情况下就make sense了,可能需要构造输入来触发相应的call stack来辅助探查问题。
- static analysis report verification 顾名思义用程序真实执行结果来验证静态分析得到的相关结论,其过程也需要构造输入,构造的输入需要尽可能的往静态分析的结果位置走。
- information flow detection 标注程序中的sinks和sources,作为敏感位置,为dynamic taint analysis提供驱动力。
0x02 现存相关的directed fuzzer存在的局限
- 大多数based symbolic execution,被称为directed symbolic execution,它将reachability problem的求解过程转换为了一个迭代约束满足性问题(iterative constraint satisfaction problem),
,其中 表示某个已经已经reached的点, 表示其reach到 所需要的条件,接着你如果需要在 的基础上探索更深的路径,你就可以考虑接下来需要的condition 。但是这样做就比较依赖source code,并且你需要构造对应某条路径 的constraint,这里的constraint要作为可以求解的表达式,这就是说你需要一个constraint slover,太过于抽象不能转换为机器自动求解,也是鸡肋。当然你考虑在binary上来做的话也是可以的,只要你有相应的representation就行。 - directed symbolic execution代价太昂贵,参考Katch;
0x03 简单介绍一下本文工作
本文在尝试改进directed fuzzer,在前提我们感兴趣的target side给定的情况下,我们如何让fuzzer的行进路线更优于它们?
- 将reachability problem转换了一个优化问题,将种子和the distance of target side绑定来作为种子选择的依据;
- 距离的度量分为过程间和过程内两个计算策略,其计算过程依赖call graph和control flow graph;
- 距离的计算同时发生在静态(被compiler编译之前)和动态(程序运行之后),静态计算每个基本块与目标地址的距离, 动态计算种子的距离;
- 在种子选择策略上使用模拟退火来驱动能量调度。
0x04 最值得关注点
- seed distance的度量方式
- seed optimization
0x05 seed distance的度量方式
1. function-level
用于度量某个给定函数和目标函数之间的距离,自然地这个距离的计算建立在CG(call graph)上。给定两个CG上的node
其中
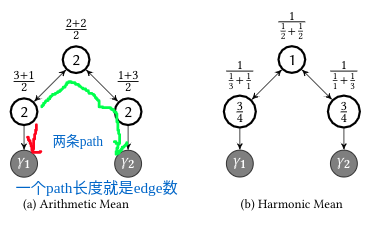
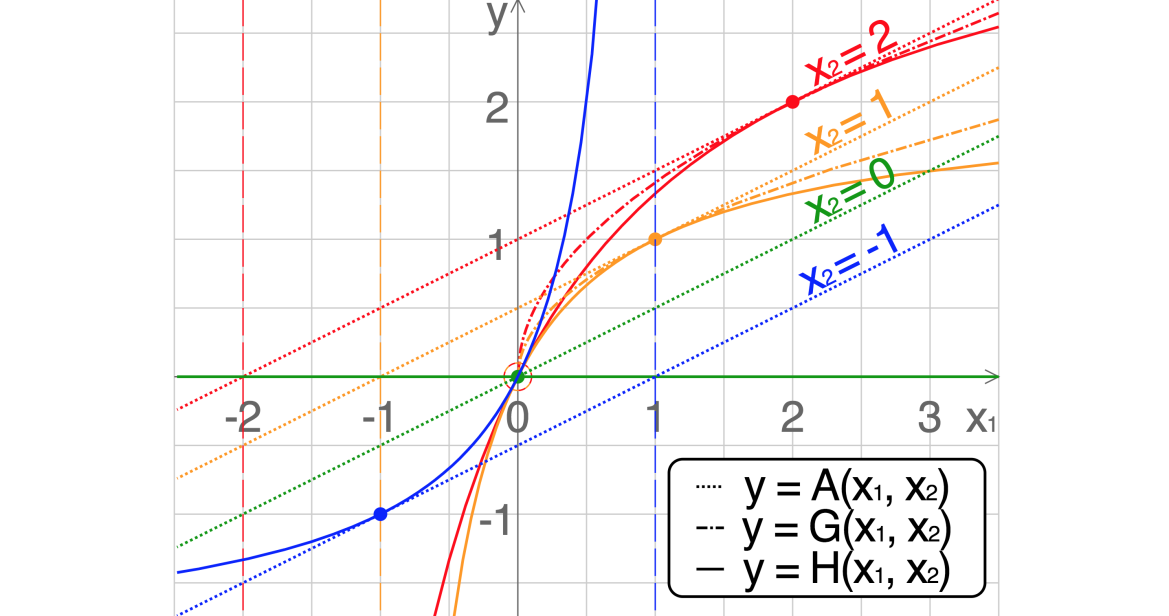
可以看到在算术平均下,三个nodes对目标函数距离的平均是相等的,这显然不符合预期。作为补充,文中更关注是找到一条最近的路径,这也可以成为什么选择调和平均的理由,因为调和平均和几何平均都是对小数更“敏感”,这个敏感如何精确的描述呢? 参考其图像,其中小数让其图像更陡(观察下图中
2. basic-block-level
用于度量给定某个基本块和目标基本块的距离。注意这个目标基本块它是指包含目标函数调用的基本块,也就是说文章的instrument过程不标记基本块为目标,而是如果某个基本块可能发生问题,我可以在这里插一个目标函数,让它往这里走. 给定某个特定过程内的CFG
- 如果
, 正好落在了 上,这种情况下自然 和 的距离为0; - 如果
,那么取到目标函数最短的距离乘上某个常系数; - 在不满足上述两个情况的条件下,考虑
在 上可达的其他基本块 ,类似地考虑 到 的距离,同时加上 到 的最短路径.
实际上,针对前面计算操作,这里我有一个疑问是如何解决reachability问题? 因为所有的计算都建立在假设已知函数和函数之间的可达性以及基本块之间的可达性的基础之上。关于这一点还需要去看代码才行。
通过前面定义的两种度量方式,我们可以在静态阶段就给某个CFG上每个node(基本块)都assign一个值,这个值就表示其距离目标函数的远近程度。然后利用这个值来计算当前运行过程中seed对应的seed distance,严格定义如下
0x06 seed optimization
在具体构建模拟退火调度之前,先理解文中提到的两个概念:
exploration
探索模式可以理解为在全局上有策略地随机的搜索最好的local解,这个过程aflgo和afl工作方式相同,都是基于覆盖率来调度seed sequence。这个模式要先于下面的exploitation,并不是一上来就基于user defined target info来做辅助,而是先拿到更多路径,到了一定limits再使用下面的策略,从直觉上说这是确实是对的,有了路径多样性,我们才能来做更准确的distance的测算。
exploitation
构造模式在前面探索模式达到一定limits就选择进入,例如设置相关的时间阈值。在拥有了路径的多样性之后,针对性对target location发起进攻,优先选择离target location更近的种子来进行fuzz,并增加其mutation次数。
exploration和exploitation由能量调度策略来进行切换,首先需要理解什么是the energy of seed? 一个种子所带的能量其实就是指其fuzzer对其做mutation的次数,能量越大,fuzzer在其基础上产生的新种子可能就越多。
在“Coverage-based Greybox Fuzzing As MarkovChain”一文中使用了马尔科夫链来model fuzzing,结合power schedule来驱动fuzzing。本文作者正是由此而尝试使用模拟退火方法,因为模拟退火在本质上就是一种马尔科夫蒙特卡洛方法。常用于固定时间内在较大的解空间中搜索近似全局最优解的优化方法。模拟退火的思想借鉴于固体的退火原理,当固体的温度很高的时候,内能比较大,固体的内部粒子处于快速无序运动,当温度慢慢降低的过程中,固体的内能减少,粒子的慢慢趋于有序,最终当固体处于常温时,内能达到最小,此时粒子最为稳定。
模拟退火从描述是从某一较高的稳定出发,这个温度称为初始温度,伴随着温度参数的不断下降,得到近似解也在不断的变换。类比爬山算法,该算法每次都会从当前的临近解空间中选择一个最优的解,直到达到一个局部最优解。而模拟退火,即使某次搜索过程中得到了局部最优解,也有一定概率去搜索其他的解(接受非最优解),避免陷入局部最优解。这个概率是随着温度地降低而变化的,这个过程参照物理系统总是趋向于能量最低,但分子热运动则趋向于破坏这种低能量的状态,所以存在一定几率导致其能量并没有发送变化,温度越低这个概率是越小的。
在了解模拟退火的基本概念之后,首先需要model一个降温过程即cooling schedule,这个降温过程应该是比较缓慢的,文章使用model如下
前面提到exploration和exploitation切换的limits文章显式的设置为
给定种子
这个函数在
里面没有极值点,因此只需要考虑边界上的点. 当 时, 最大值为 ,同理当 时, 最小值为 . 所以有 . 对任意seed而言在初始状态
时都相同的能量 . 固定多个时刻
,观察种子能量随着 的变化,随时间增加 越小,曲线越陡。 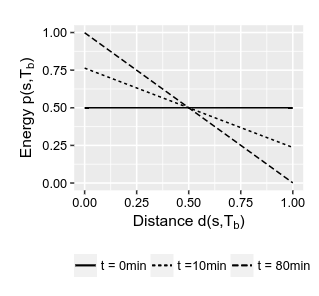
相同时刻
越小,其能量是越低的。 固定多个不同的种子距离
,观察它们随着 的变化 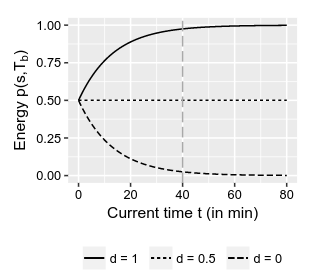
这里很奇怪,
时,这条曲线有问题, 应该是随着时间的增加其能量也是逐渐增加收敛到 ,这里应该是 和 标注反了。
从图像上分析你会发现
前面我们分析
的时候知道,在 时所有seeds的能量都是 ,所以这里也有 这是符合预期的 由
的最大值和最小值,可以得出 的最大值为 ( )和最小值为 ( ). 符合越进近的种子,其能量是越大的。
整体上有一些definition我始终觉得缺点什么?
延伸阅读:
- Constraint-guided Directed Greybox Fuzzing usenix2021 (为target生成constraint,以slove constraint作为驱动)
- Targeted Greybox Fuzzing with Static Lookahead Analysis icse2020 (区块链但是它考虑targets的order关系)
参考资料:
- https://zhuanlan.zhihu.com/p/143016455 马尔科夫蒙特卡洛方法
- https://www.cnblogs.com/heaad/archive/2010/12/20/1911614.html 大白话解析模拟退火
- https://zhuanlan.zhihu.com/p/47628209 比较详细和科学的模拟退火介绍